Cone Algorithm
--- Generic surface particle identification algorithm
Yanting Wang
Introduction
The cone algorithm is a fast algorithm that can accurately identify
which particles are on the surface of a condense-phase cluster in three
dimensions. While a general computational geometry
algorithm, it is especially useful for computational surface science and
computational nano science.
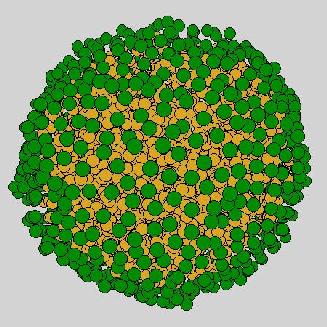
A sample cluster performed with the cone algorithm is shown below.
The green spheres are the particles identified as on the surface, and
yellow ones are inside.
Downloading source code
The source code for the cone algorithm is free for academic or personal
usage. By downloading the following source code, you agree that:
- the source code will only be used for academic or personal purpose, not
commercial purpose.
- the author is not responsible for any consequences caused by the usage
of this code.
- if the usage of this code leads to publishable research results, you will
cite the original publication describing this algorithm:
Yanting Wang, S. Teitel, and Christoph Dellago,
Melting of Icosahedral Gold Nanoclusters from Molecular Dynamics Simulations
J. Chem. Phys. 122 214722-214738, 2005.
cone.tar.gz
Basic idea
For a given three-dimensional cluster composed of a set of particles,
how can we tell which particles (e.g. atoms)
are on the surface? It seems easy to tell by human eyes.
Visual criterion can be interpreted as: A particle is
on the surface if it is not all surrounded by other particles. How can we
decide if a concave particle is on the surface or not?
We may say: if it is not so deep in the cave, it can be treated as a surface
particle.
In order to tell computer how to pick up surface particles according to
their positions, one quantified expression equivalent to the above
criteria is:
|
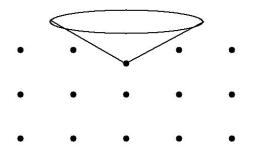
For a given particle, its associated cone region
is defined as the region inside a cone of a certain side length and
angle, whose vertex resides on the particle.
A hollow cone is a cone region with
no other particles inside it.
A particle is identified as on the surface if at least one associated
hollow cone exists.
|
There are two adjustable parameters for the cone: angle and side length. The
accuracy (or satisfactory)
of the results depends on these two parameters. This algorithm is
immediately applicable to the situations when there are multiple
molecules in one configuration and/or there are holes inside molecules.
Implementation
-
The cell index method is employed to
accelerate the identification of neghiboring particles.
The side length of cell is a little
larger than the side length of the cone (also noted as cutoff).
Neighboring particles are determined as those within the cutoff distance.
-
In order to determine if there exists a hollow cone
for a given
particle, we should loop over all the combinations of 3 of its
neighboring particles to see if other neighboring particles are in it.
The scalar products of the vectors connecting these particles
are used to determine if a cone region spanned by 3 particles
are big enough for the given two parameters and if other
particles are inside the cone region. Be
sure that the opposite cone defined by the same vectors
are also checked at the same time.
-
In order to identify a surface particle, finding the existence of
one hollow cone is enough and the loop can then be terminated.
In contrast, to identify an internal particle requires a complete search of
all of the three-neighbor combinations to assert no hollow cones exist.
This simple method is complete but time consuming. Several methods
mentioned below enhance the computational speed drastically.
-
|
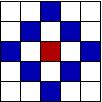
Actually most internal particles far from surface can be identified by
a much easier way according to the definition that they are all
surrounded by other partciles: for a certain cell(red), look at
designated neighbor cells(blue); if all of them contain particles,
all of the particles in this certain cell are all internal. The right
image shows the 2D case. More cells have to be checked in 3D.
|
|
-
|
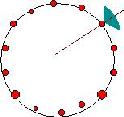
Some surface particles can also be pre-identified by the global geometry
of the cluster. For example, if the cluster has a rounded shape,
it has a good chance that a hollow cone can be found simply by choosing
the vector from the center to the particle as the principle axis of a
cone region.
|
|
-
The remained undetermined particles have to go through the above complete
loop-over
algorithm. However, we can still do something with the neighboring
particles during the loop-over:
-
Neighboring particles already identified as internal do not
have to join the loop-over procedure.
-
Because there is a better chance that a hollow cone can be found among
surface particles, first loop over the combinations of 3 surface
particles, then 2 surface and 1 undetermined, then 1 surface
and 2 undetermined, finally 3 undetermined.
Programming
Although C++ is used, the programming is more structural than object-oriented.
The program can be used with pipe to cascade standard input and output.
Details of programming and usage is documented in the README file
included in the package.
The source code has sufficient comments and should be easy to read.
Multi-layer identification
Calling the cone algorithm repeatedly can identify different sub surface
layers.
layers.C is a sample program for doing this.
The multi-layer
analysis of an icosahedral gold cluster with 2624 atoms are shown in
the daily work for gold facets.
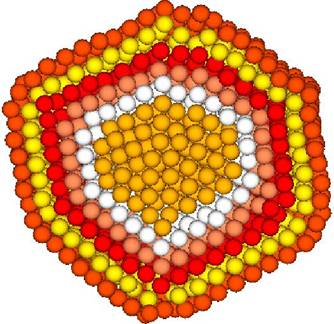
The image
below is an intersection shown of a multi-layer icosahedral gold cluster.
(The atoms are identical gold atoms. They are colored differently
according to the layers they belong to.)
Back to Yanting Wang's Homepage
You are the
 visitor since July 18, 2008.
visitor since July 18, 2008.